◉ Qwen3 from scratch#
… nothing much, was just fascinated by the technical report published by Qwen3 and thought to build the model from scratch…
Qwen3 Model Family#
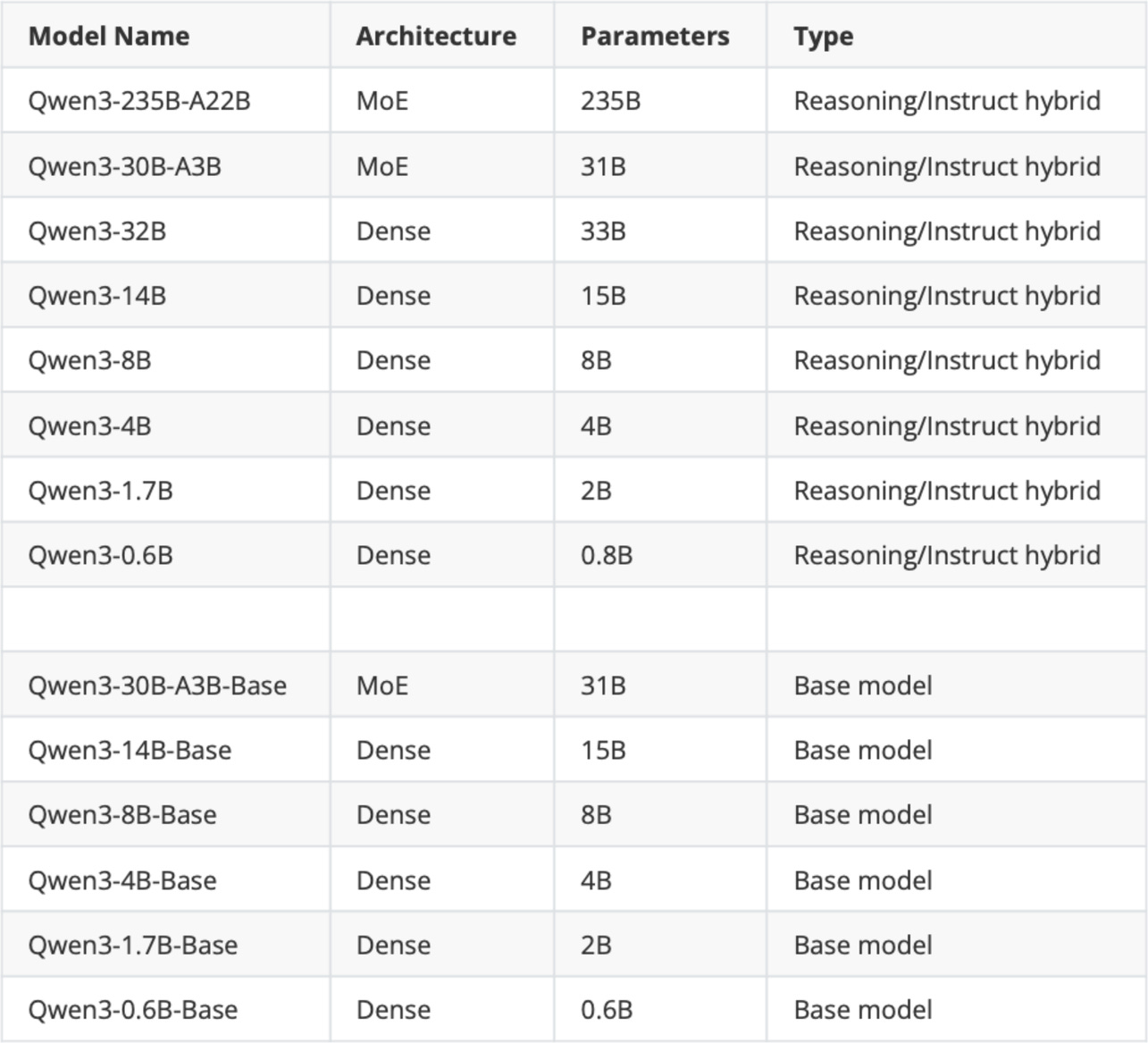 The original Qwen3 model suite released in May 2025.
The original Qwen3 model suite released in May 2025.
“MoE” is Mixture-of-Experts, and “Dense” is the regular, non-MoE models;
“Base” means pre-trained (but not fine-tuned) base model;
“Reasoning/Instruct hybrid” means that the model can be either used as a Chain-of-Thought (CoT)-style reasoning model or a regular instruction-following model
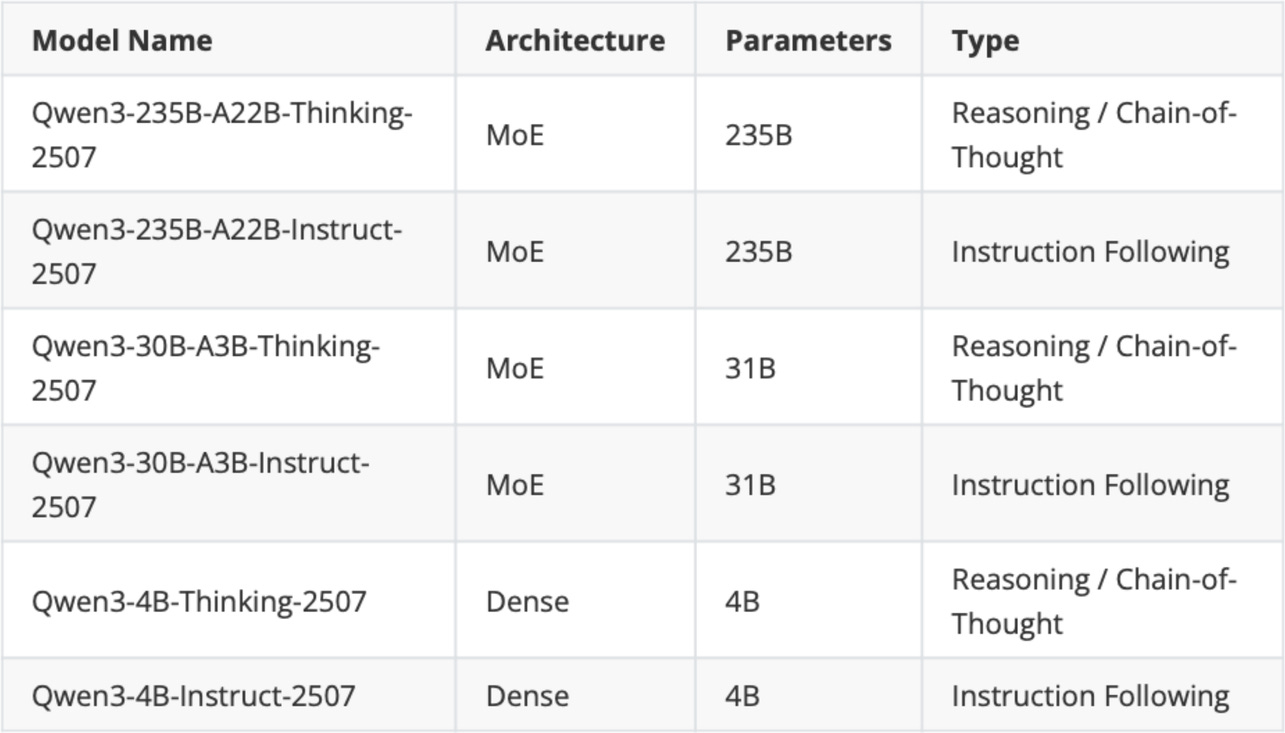
Later in July a week after Kimi K2 release, the Qwen3 team updated some of its models
On September 5th, Qwen3 released a 1T parameter “max” instruct variant that beats Kimi K2, DeepSeek 3.1, and Claude Opus 4 on all major benchmarks.
Pre and Post Training#
I have summarised the pre and post training stages with EVALS from the technical report ![]() . Remember to read the details on each stages from the report…
. Remember to read the details on each stages from the report…
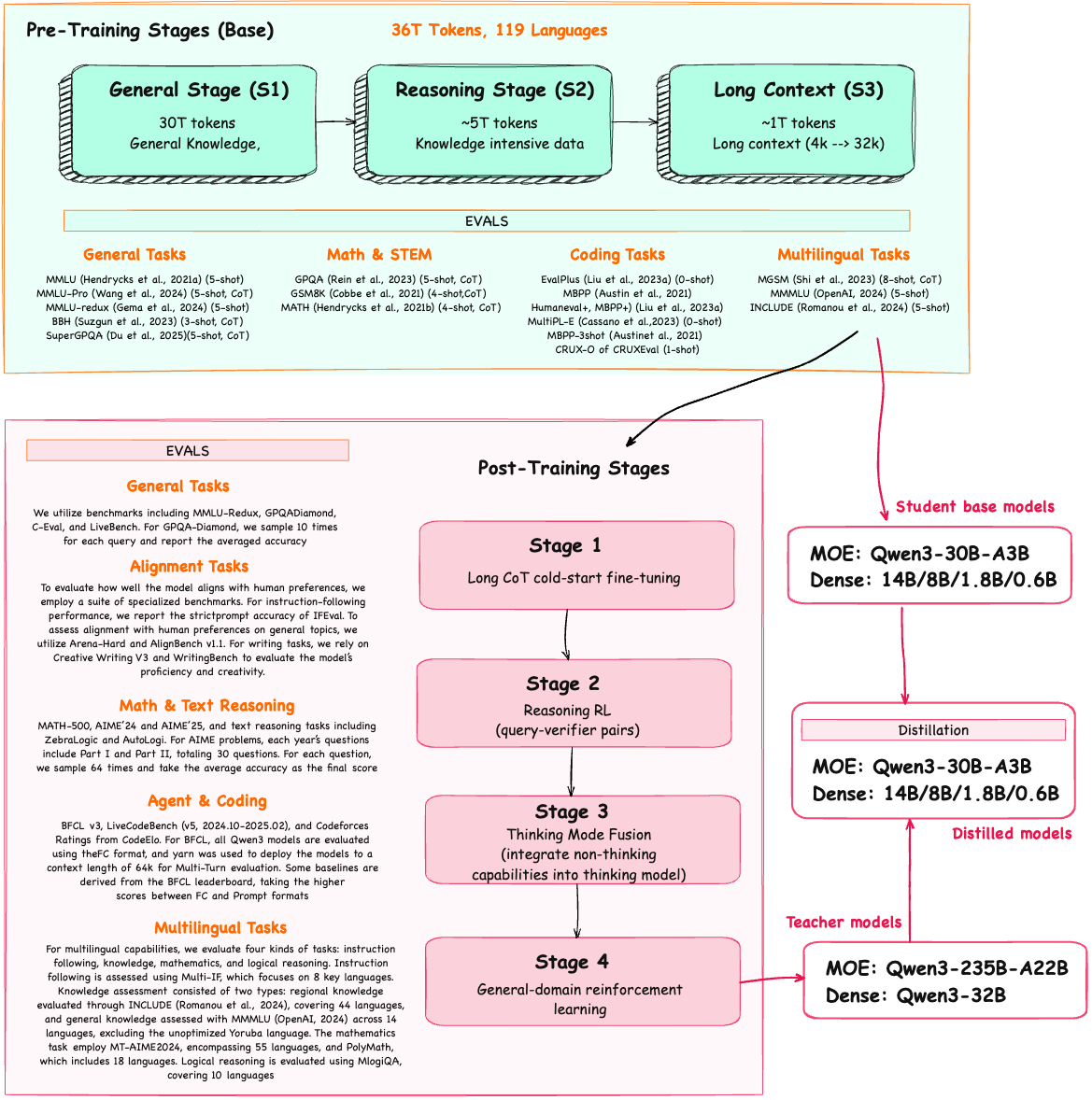
Note: that the steps correspond to the Qwen3 base and hybrid models released in May. There was no separate paper for the separate reasoning and instruct variants released in July.
Overall, the pre-training stages looks fairly standard. The interesting aspect here is that in Stage 2, the Qwen3 team explicitly included knowledge-intensive (chain-of-thought-style) data, which is said to enhance reasoning capabilities later on - this would result into base models exhibiting some reasoning behavior already…
Post Training pipeline looks very similar to DeepSeek R1…
Stage 1: Supervised fine-tuning on chain-of-thought data
Stage 2: Reinforcement learning with verifiable rewards
Stage 3: more supervised fine-tuning (this time including general, non-reasoning data to support the reasoning/instruct hybrid behavior)
Stage 4: General-domain reinforcement learning
Architecture Qwen3#
Qwen3 is build on the decoder submodule of the [original transformer architecture] ![]() - but with a few changes. The model consists of a token embedding layer followed by 28 transformer blocks (for smaller model variants), each containing RMSNorm, RoPE, QKNorm, masked grouped-query attention with
- but with a few changes. The model consists of a token embedding layer followed by 28 transformer blocks (for smaller model variants), each containing RMSNorm, RoPE, QKNorm, masked grouped-query attention with N heads (e.g. 16, 32 etc), and a feed-forward module with an intermediate size of d_hidden (eg. 3,072).
Root Mean Square Normalization#
Qwen3 performs RMSNorm (1) before grouped-query attention(GQA) (2) before feed-forward (SwiGLU MLP) (3) Final RMSNorm before LM head
RMSNorm fulfills the same core function as LayerNorm: normalizing layer activations to stabilize and improve training. However, it simplifies the computation by removing the mean-centering step. This means that activations will still be normalized, but they are not centered at 0
a bit of recap on normalization..
⚠️ deep nets (especially transformers) get numerically and statistically wild as they stack many layers. Norm layers keep activation in a sane range so training stays stable and gradients keep flowing.
⚠️ Without normalization, each layer can amplify or shrink values a bit; after dozens of layers you can get exploding/vanishing activations.
RMSNorm without learned scale/bias
Simple numeric example#
Let hidden size (d=4). Take one token vector:
RMS:
Now imagine training drift scales this token by 10×:
============== Qwen3's RMSNorm ==============
import torch.nn as nn
class RMSNorm(nn.Module):
def __init__(
self,
emb_dim,
eps=1e-6,
bias=False,
qwen3_compatible=True,
):
super().__init__()
self.eps = eps
self.qwen3_compatible = qwen3_compatible
self.scale = nn.Parameter(torch.ones(emb_dim))
self.shift = (
nn.Parameter(torch.zeros(emb_dim)) if bias
else None
)
def forward(self, x):
input_dtype = x.dtype
if self.qwen3_compatible:
x = x.to(torch.float32)
variance = x.pow(2).mean(dim=-1, keepdim=True)
norm_x = x * torch.rsqrt(variance + self.eps)
norm_x = norm_x * self.scale
if self.shift is not None:
norm_x = norm_x + self.shift
return norm_x.to(input_dtype)
Example#
Lets consider one training example where the normalization is applied to the vector consisting of 6 features i.e. 6-D output
import torch
torch.set_printoptions(precision=2, sci_mode=False)
x = torch.tensor([[5.61, 14.32, 0.00, 34.88, 38.70, 11.29]], dtype=torch.float32)
rms = RMSNorm(emb_dim=6, eps=1e-6, bias=False, qwen3_compatible=True)
y_rms = rms(x)
def stats(t):
mean = t.mean(dim=-1).item()
var = t.var(dim=-1, unbiased=False).item()
return f"{mean:.3f}", f"{var:.3f}"
raw_mean, raw_var = stats(x)
rms_mean, rms_var = stats(y_rms)
print("Input x:", x.squeeze().tolist())
print(f"Input mean={stats(x)}")
print()
print("RMSNorm output:", [round(v, 2) for v in y_rms.squeeze().tolist()])
print(f"RMSNorm mean={stats(y_rms)}")
print()
Input x: [5.610000133514404, 14.319999694824219, 0.0, 34.880001068115234, 38.70000076293945, 11.289999961853027]
Input mean=('17.467', '207.966')
RMSNorm output: [0.25, 0.63, 0.0, 1.54, 1.71, 0.5]
RMSNorm mean=('0.771', '0.405')
… using PyTorch out of box norm functions#
pytorch_rms = nn.RMSNorm(6, eps=1e-6, elementwise_affine=False)
pytorch_ln = nn.LayerNorm(6, eps=1e-6, elementwise_affine=False)
y_pytorch_ln = pytorch_ln(x)
y_pytorch_rms = pytorch_rms(x)
print("Input:", x)
print("Input mean/var:", stats(x))
print()
print("Torch LayerNorm:", y_pytorch_ln)
print("LN mean/var:", stats(y_pytorch_ln))
print()
print("Torch RMSNorm:", y_pytorch_rms)
print("RMS mean/var:", stats(y_pytorch_rms))
Input: tensor([[ 5.61, 14.32, 0.00, 34.88, 38.70, 11.29]])
Input mean/var: ('17.467', '207.966')
Torch LayerNorm: tensor([[-0.82, -0.22, -1.21, 1.21, 1.47, -0.43]])
LN mean/var: ('-0.000', '1.000')
Torch RMSNorm: tensor([[0.25, 0.63, 0.00, 1.54, 1.71, 0.50]])
RMS mean/var: ('0.771', '0.405')
Feed forward#
GPT-2, the feed forward module consists of two fully connected (linear) layers separated by a non-linear activation function. In Qwen3, this module is replaced with a gated linear unit (GLU) variant(ref paper), which adds a third linear layer and multiplies its output elementwise with the activated output of the second linear layer.
In Qwen3, the fully conected (fc) linear layers in GLU variant (fc1, fc2) is half the size in comparison to standard feed forward e.g. GPT-2
e.g. from Qwen3 0.6B variant
fc1: 1024 × 3,072 = 3,145,728
fc2: 1024 × 3,072 = 3,145,728
fc3: 1024 × 3,072 = 3,145,728
Total: 3 × 3,145,728 = 9,437,184 parameters
Compares to standard Feed forward i.e. fc1 and fc2 being twice of GLU
fc1: 1024 × 2×3,072 = 6,291,456
fc2: 1024 × 2×3,072 = 6,291,456
Total: 2 × 6,291,456 = 12,582,912 parameters
While GLU variants usually have fewer parameters than regular feed forward modules, they perform better. The improvement comes from the additional multiplicative interaction introduced by the gating mechanism, activation(x_fc1) * x_fc2, which increases the model’s expressivity. This is similar to how deeper, slimmer networks can outperform shallower, wider ones, given proper training.
import numpy as np
import matplotlib.pyplot as plt
def relu(x):
return np.maximum(0, x)
def gelu_tanh(x):
# GELU tanh approx:
# 0.5*x*(1 + tanh(sqrt(2/pi) * (x + 0.044715*x^3)))
return 0.5 * x * (1.0 + np.tanh(np.sqrt(2.0/np.pi) * (x + 0.044715 * x**3)))
# Also known as SiLU
def swish(x):
# x * sigmoid(x)
return x / (1.0 + np.exp(-x))
x = np.linspace(-5, 5, 1000)
y_relu = relu(x)
y_gelu = gelu_tanh(x)
y_swish = swish(x)
plt.figure(figsize=(11, 6.5))
plt.plot(x, y_relu, label=r"ReLU: $\max(0, x)$")
plt.plot(x, y_gelu, linestyle="--",
label=r"GELU: $\approx 0.5x(1+\tanh(\sqrt{2/\pi}(x+0.044715x^3)))$")
plt.plot(x, y_swish, linestyle=":",
label=r"Swish/ (SiLU): $x\sigma(x)=\frac{x}{1+e^{-x}}$")
plt.axhline(0)
plt.axvline(0)
plt.xlabel("x")
plt.ylabel("Activation")
plt.title("Activation Functions: ReLU vs GELU vs Swish/ (SiLU)")
plt.grid(True)
plt.legend(loc="upper left")
plt.show()
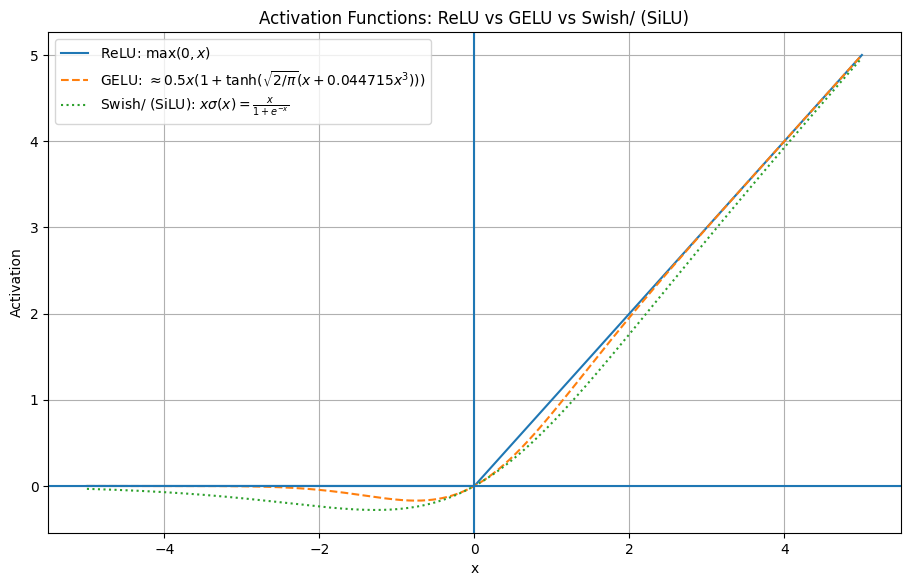
Different activation functions that can be used in a feed forward module (neural network). GELU and SiLU (Swish) offer smooth alternatives to ReLU, which has a sharp kink at input zero. Newer models have largely replaced GELU with the SiLU as it has a similar smoothness, but it is slightly cheaper to compute than GELU and offers comparable modeling performance
============== Qwen3's feed forward ==============
class FeedForward(nn.Module):
def __init__(self, cfg):
super().__init__()
self.fc1 = nn.Linear(
cfg["emb_dim"], cfg["hidden_dim"], dtype=cfg["dtype"],
bias=False
)
self.fc2 = nn.Linear(
cfg["emb_dim"], cfg["hidden_dim"], dtype=cfg["dtype"],
bias=False
)
self.fc3 = nn.Linear(
cfg["hidden_dim"], cfg["emb_dim"], dtype=cfg["dtype"],
bias=False
)
def forward(self, x):
x_fc1 = self.fc1(x)
x_fc2 = self.fc2(x)
# The non-linear activation function here is a SiLU function,
# which will be discussed later
x = nn.functional.silu(x_fc1) * x_fc2
return self.fc3(x)
Rotary Position Embeddings (RoPE)#
In transformer-based LLMs, positional encoding is necessary because of the attention mechanism. By default, attention treats the input tokens as if they have no order. In the original GPT architecture, absolute positional embeddings addressed this by adding a learned embedding vector for each position in the sequence, which is then added to the token embeddings.
RoPE (rotary position embeddings) introduced a different approach: instead of adding position information as separate embeddings, it encodes position information by rotating the query and key vectors in the attention mechanism in a way that depends on each token’s position.
![]()
Lets assume Qwen 0.6B single pass with single head and tiny dimension for input “My name is Qwen” i.e. positions (0,1,2,3)
model hidden size \(d_{\text{model}}=8\)
single head, so head dim (d_h=8)
causal mask (like Qwen): token can only attend to itself + earlier tokens
tokens: (t_0=)“My”, (t_1=)“name”, (t_2=)“is”, (t_3=)“Qwen”
positions: \((m \in {0,1,2,3})\)
Each token has an embedding vector:
Classical transformer approach…#
absolute pos embeddings:
and the input to the block is:
perform Q, K, V projections
where \((W_Q,W_K,W_V \in \mathbb{R}^{d_{\text{model}}\times d_h})\)
…and then compute Attention logits
For query token at position (i) attending to key token at position (j):
Attention weights and output
After attention, the block passes (o) forward (often through output projection + residual + RMSNorm etc).
RoPE approach…#
In RoPE transformer, there is no positional embedding (p_m) added to token embedding.
… and then after perform Q, K, V projections it rotate Q/K by position, so position affects attention only through the dot product geometry (rotation)
and then use the rotated q’_m and k’_m to compute attention logits and output…
Computing R(m)#
head dim (d = 8) (even)
number of RoPE pairs \((= d/2 = 4)\)
Will assume 6 input tokens ⇒ positions \( (m \in {0,1,2,3,4,5}) \)
base \((\theta = 10000)\) (usual init for theta)
Any head vector (query or key) for one token would look like (for given d):
⚫️ a) Pair Creation: RoPE pairs the first half with the second half (same for Q and K)#
⚠️ Note: RoPE also uses adjacent pair pattern, but Qwen3 HF code: pairs are (0, D/2), (1, D/2+1), (2, D/2+2)… i.e. it uses classic rotate_half pattern… Refer rm_adjacent_pattern.ipynb for details on calculating R(m) using adjacent pattern
Split the vector into two halves:
Then we form \(d/2\) rotation pairs by matching the same index across halves:
pair 0: \((q_0, q_4)\)
pair 1: \((q_1, q_5)\)
pair 2: \((q_2, q_6)\)
pair 3: \((q_3, q_7)\)
This is exactly what rotate_half(x) = concat(-x2, x1) implies:
it treats \((q_i, q_{i+d/2})\) as the 2D coordinates to rotate.
⚫️ b) Compute \( \omega \) (omega) for each pair i i.e. a per-pair frequency (a constant for pair i, same for all tokens)#
With
So for each pair i = (0, 1, 2, 3):
\((\omega_0 = 1)\)
\((\omega_1 = 0.1)\)
\((\omega_2 = 0.01)\)
\((\omega_3 = 0.001)\)
In the rotate_half implementation you often see the same thing written as:
because the code typically builds the exponent from torch.arange(0, d, 2) = [0, 2, 4, ...], which is exactly 2i
import torch
theta = 10000.0
d = 8
i = torch.arange(0, d//2, dtype=torch.float32)
omega = theta ** (-2*i/d)
inv_freq = 1 / (theta ** ((2*i)/d))
print("omega:", omega)
print("inv_freq:", inv_freq)
omega: tensor([1.0000, 0.1000, 0.0100, 0.0010])
inv_freq: tensor([1.0000, 0.1000, 0.0100, 0.0010])
⚫️ c) Calculate rotation angle \(\phi_m\) (phi) per input token (denoted by position m), per-pair i#
so 6 input tokens ⇒ positions \( (m \in {0,1,2,3,4,5}) \), we get 6 sets of 4 angles.
import torch
omega = torch.tensor([1.0, 0.1, 0.01, 0.001])
for m in range(6):
phi = m * omega
print(f"m={m} --> ϕm={[float(f'{x:.2f}') for x in phi.tolist()]}")
m=0 --> ϕm=[0.0, 0.0, 0.0, 0.0]
m=1 --> ϕm=[1.0, 0.1, 0.01, 0.0]
m=2 --> ϕm=[2.0, 0.2, 0.02, 0.0]
m=3 --> ϕm=[3.0, 0.3, 0.03, 0.0]
m=4 --> ϕm=[4.0, 0.4, 0.04, 0.0]
m=5 --> ϕm=[5.0, 0.5, 0.05, 0.01]
⚫️ d) Build a 2x2 rotation block for one pair in \(q_{(m)}\) and angle \(\phi_m\)#
one token at position (m) has a query vector:
RoPE produces the rotated query:
For the half-rotation layout, the rotation happens on pairs:
So each pair uses the standard 2D rotation matrix with its own angle \(\phi_{m,i}\):
Example (pair 0 uses indices 0 and 4):
Similarly:
pair 1 rotates indices (1,5) using \(\phi_{m,1}\)
pair 2 rotates indices (2,6) using \(\phi_{m,2}\)
pair 3 rotates indices (3,7) using \(\phi_{m,3}\)
Pair 0 (indices 0,4): \((q^{(m)}_0, q^{(m)}_4)\) with angle \(\phi_{m,0}\)
Pair 1 (indices 1,5): \((q^{(m)}_1, q^{(m)}_5)\) with angle \(\phi_{m,1}\)
Pair 2 (indices 2,6): \((q^{(m)}_2, q^{(m)}_6)\) with angle \(\phi_{m,2}\)
Pair 3 (indices 3,7): \((q^{(m)}_3, q^{(m)}_7)\) with angle \(\phi_{m,3}\)
So, the full \(R(m)\) matrix is sparse and couples \((0,4)\), \((1,5)\), \((2,6)\), \((3,7)\) (instead of adjacent blocks):
e.g. Rotate \(q\) for single token at position m=5
import torch
def rope_omega(d=8, theta=10000.0):
# Same ω schedule for both adjacent-pair and half-rotation patterns
i = torch.arange(0, d//2, dtype=torch.float32) # [0,1,2,3]
return theta ** (-2*i/d)
def rope_rotate_q(q, m, theta=10000.0):
# q: shape (d,)
d = q.shape[-1]
assert d % 2 == 0, "d must be even"
d2 = d // 2
omega = rope_omega(d, theta).to(q.device) # (d/2,)
phi = m * omega # (d/2,)
cos, sin = torch.cos(phi), torch.sin(phi) # (d/2,)
# Half-rotation / rotate-half layout:
# pair i is (i, i + d/2)
q1 = q[:d2] # indices 0..d/2-1
q2 = q[d2:] # indices d/2..d-1
q1_tilde = q1 * cos - q2 * sin
q2_tilde = q1 * sin + q2 * cos
q_tilde = torch.cat([q1_tilde, q2_tilde], dim=-1)
return q_tilde, phi
q = torch.tensor([1.,2.,3.,4.,5.,6.,7.,8.])
q_tilde, phi = rope_rotate_q(q, m=5)
print("phi:", phi)
print("q:", q)
print("q_tilde:", q_tilde)
phi: tensor([5.0000, 0.5000, 0.0500, 0.0050])
q: tensor([1., 2., 3., 4., 5., 6., 7., 8.])
q_tilde: tensor([ 5.0783, -1.1214, 2.6464, 3.9600, 0.4594, 6.2243, 7.1412, 8.0199])
⚫️ e) Lastly we formulate the full \(R(m)\) matrix for (d=8) i.e. 8x8#
Define \(R(m)\in\mathbb{R}^{8\times 8}\) such that:
For half-rotation, \(R(m)\) contains four independent 2×2 rotations, but they are interleaved in the original coordinate order:
indices (0,4) use \(\phi_{m,0}\)
indices (1,5) use \(\phi_{m,1}\)
indices (2,6) use \(\phi_{m,2}\)
indices (3,7) use \(\phi_{m,3}\)
So explicitly, \(R(m)\) is:
(Geometric note) If you reorder coordinates as \([0,4,1,5,2,6,3,7]\), this matrix becomes block-diagonal with four 2×2 blocks. In HF code, we avoid building \(R(m)\) explicitly and apply the same effect with
rotate_half.
Derivative w.r.t q (full)
Since \(\tilde{q}^{(m)} = R(m) \cdot q^{(m)}\):
⚠️ For a given token at m=5, prove that the matrix form (geometric view) \(R(m) \cdot q^{(m)}\) IS EQUAL to pairwise rotations.
For \(d=8\) and \(\theta=10000\) we already have:
So at token position \(m=5\):
Now apply the pairwise half-rotation rule (each pair is \((i, i+d/2)\)):
pair 0 rotates \((q_0, q_4)\) by \(\phi_{5,0}\)
pair 1 rotates \((q_1, q_5)\) by \(\phi_{5,1}\)
pair 2 rotates \((q_2, q_6)\) by \(\phi_{5,2}\)
pair 3 rotates \((q_3, q_7)\) by \(\phi_{5,3}\)
That yields:
and similarly for \((1,5)\) with angle \(0.5\), \((2,6)\) with \(0.05\), \((3,7)\) with \(0.005\).
If you write those four 2D rotations into a single linear map over \(\mathbb{R}^8\), you get the 8×8 matrix \(R(5)\) from the previous section — i.e.:
So the “matrix form” is a glorified way of stacking the four independent 2D rotations into one big linear operator.
import torch
def build_Rm(m, d=8, theta=10000.0):
omega = rope_omega(d, theta)
phi = m * omega
cos, sin = torch.cos(phi), torch.sin(phi)
Rm = torch.zeros(d, d)
# Half-rotation / rotate-half layout: pair i is (i, i + d/2)
d2 = d // 2
for i in range(d2):
a = i
b = i + d2
Rm[a, a] = cos[i]
Rm[a, b] = -sin[i]
Rm[b, a] = sin[i]
Rm[b, b] = cos[i]
return Rm, phi
# For a single token at position m=5
q = torch.tensor([1.,2.,3.,4.,5.,6.,7.,8.])
Rm, phi = build_Rm(m=5)
q_tilde_mat = Rm @ q
q_tilde_pair, _ = rope_rotate_q(q, m=5)
print("phi:", phi)
print("q:", q)
print("R(m):", Rm)
print("q_tilde (matrix form):", q_tilde_mat)
print("q_tilde (pairwise form):", q_tilde_pair)
print("Difference:", (q_tilde_mat - q_tilde_pair).abs().max().item())
phi: tensor([5.0000, 0.5000, 0.0500, 0.0050])
q: tensor([1., 2., 3., 4., 5., 6., 7., 8.])
R(m): tensor([[ 0.2837, 0.0000, 0.0000, 0.0000, 0.9589, 0.0000, 0.0000, 0.0000],
[ 0.0000, 0.8776, 0.0000, 0.0000, 0.0000, -0.4794, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.9988, 0.0000, 0.0000, 0.0000, -0.0500, 0.0000],
[ 0.0000, 0.0000, 0.0000, 1.0000, 0.0000, 0.0000, 0.0000, -0.0050],
[-0.9589, 0.0000, 0.0000, 0.0000, 0.2837, 0.0000, 0.0000, 0.0000],
[ 0.0000, 0.4794, 0.0000, 0.0000, 0.0000, 0.8776, 0.0000, 0.0000],
[ 0.0000, 0.0000, 0.0500, 0.0000, 0.0000, 0.0000, 0.9988, 0.0000],
[ 0.0000, 0.0000, 0.0000, 0.0050, 0.0000, 0.0000, 0.0000, 1.0000]])
q_tilde (matrix form): tensor([ 5.0783, -1.1214, 2.6464, 3.9600, 0.4594, 6.2243, 7.1412, 8.0199])
q_tilde (pairwise form): tensor([ 5.0783, -1.1214, 2.6464, 3.9600, 0.4594, 6.2243, 7.1412, 8.0199])
Difference: 0.0
============== Qwen3's RoPE function ==============
compute_rope_params(...)
Precomputes cos and sin tables for all positions up to context_length.
import torch
def compute_rope_params(head_dim, theta_base=10_000, context_length=4096, dtype=torch.float32):
assert head_dim % 2 == 0, "Embedding dimension must be even"
# Compute the inverse frequencies
inv_freq = 1.0 / (theta_base ** (torch.arange(0, head_dim, 2, dtype=dtype)[: (head_dim // 2)].float() / head_dim))
# Generate position indices
positions = torch.arange(context_length, dtype=dtype)
# Compute the angles
angles = positions.unsqueeze(1) * inv_freq.unsqueeze(0) # Shape: (context_length, head_dim // 2)
# Expand angles to match the head_dim
angles = torch.cat([angles, angles], dim=1) # Shape: (context_length, head_dim)
# Precompute sine and cosine
cos = torch.cos(angles)
sin = torch.sin(angles)
return cos, sin, angles
cos, sin, angles = compute_rope_params(
head_dim=8,
theta_base=10_000.0,
context_length=6,
)
print("cos:", cos)
print("sin:", sin)
print("angles:", angles)
cos: tensor([[ 1.0000, 1.0000, 1.0000, 1.0000, 1.0000, 1.0000, 1.0000, 1.0000],
[ 0.5403, 0.9950, 0.9999, 1.0000, 0.5403, 0.9950, 0.9999, 1.0000],
[-0.4161, 0.9801, 0.9998, 1.0000, -0.4161, 0.9801, 0.9998, 1.0000],
[-0.9900, 0.9553, 0.9996, 1.0000, -0.9900, 0.9553, 0.9996, 1.0000],
[-0.6536, 0.9211, 0.9992, 1.0000, -0.6536, 0.9211, 0.9992, 1.0000],
[ 0.2837, 0.8776, 0.9988, 1.0000, 0.2837, 0.8776, 0.9988, 1.0000]])
sin: tensor([[ 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000, 0.0000],
[ 0.8415, 0.0998, 0.0100, 0.0010, 0.8415, 0.0998, 0.0100, 0.0010],
[ 0.9093, 0.1987, 0.0200, 0.0020, 0.9093, 0.1987, 0.0200, 0.0020],
[ 0.1411, 0.2955, 0.0300, 0.0030, 0.1411, 0.2955, 0.0300, 0.0030],
[-0.7568, 0.3894, 0.0400, 0.0040, -0.7568, 0.3894, 0.0400, 0.0040],
[-0.9589, 0.4794, 0.0500, 0.0050, -0.9589, 0.4794, 0.0500, 0.0050]])
angles: tensor([[0.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00,
0.0000e+00, 0.0000e+00],
[1.0000e+00, 1.0000e-01, 1.0000e-02, 1.0000e-03, 1.0000e+00, 1.0000e-01,
1.0000e-02, 1.0000e-03],
[2.0000e+00, 2.0000e-01, 2.0000e-02, 2.0000e-03, 2.0000e+00, 2.0000e-01,
2.0000e-02, 2.0000e-03],
[3.0000e+00, 3.0000e-01, 3.0000e-02, 3.0000e-03, 3.0000e+00, 3.0000e-01,
3.0000e-02, 3.0000e-03],
[4.0000e+00, 4.0000e-01, 4.0000e-02, 4.0000e-03, 4.0000e+00, 4.0000e-01,
4.0000e-02, 4.0000e-03],
[5.0000e+00, 5.0000e-01, 5.0000e-02, 5.0000e-03, 5.0000e+00, 5.0000e-01,
5.0000e-02, 5.0000e-03]])
apply_rope(x, cos, sin, offset)
Applies RoPE to Q/K tensor shaped (batch, num of heads,num of tokens, head_dim) i.e. B, H, T, D.
import torch
def apply_rope(x, cos, sin, offset=0):
# x: (batch_size, num_heads, seq_len, head_dim)
batch_size, num_heads, seq_len, head_dim = x.shape
assert head_dim % 2 == 0, "Head dimension must be even"
# Split x into first half and second half
x1 = x[..., : head_dim // 2] # First half
x2 = x[..., head_dim // 2:] # Second half
# Adjust sin and cos shapes
cos = cos[offset:offset + seq_len, :].unsqueeze(0).unsqueeze(0) # Shape: (1, 1, seq_len, head_dim)
sin = sin[offset:offset + seq_len, :].unsqueeze(0).unsqueeze(0)
# Apply the rotary transformation
rotated = torch.cat((-x2, x1), dim=-1)
x_rotated = (x * cos) + (rotated * sin)
# It's ok to use lower-precision after applying cos and sin rotation
return x_rotated.to(dtype=x.dtype)
if __name__ == "__main__":
torch.manual_seed(0)
BATCH, NUM_HEADS, NUM_TOKENS, D = 2, 3, 6, 8
x = torch.randn(BATCH, NUM_HEADS, NUM_TOKENS, D)
cos, sin, angles = compute_rope_params(
head_dim=D,
theta_base=10_000.0,
context_length=NUM_TOKENS,
)
y = apply_rope(x, cos, sin, offset=5)
print("Original Tensor (x) shape:", x.shape)
print("Rotated Tensor (y) shape:", y.shape)
print("Tensor [0, 0, 0] before RoPE:", x[0, 0, 0])
print("Tensor [0, 0, 0] after RoPE:", y[0, 0, 0])
Original Tensor (x) shape: torch.Size([2, 3, 6, 8])
Rotated Tensor (y) shape: torch.Size([2, 3, 6, 8])
Tensor [0, 0, 0] before RoPE: tensor([-1.1258, -1.1524, -0.2506, -0.4339, 0.8487, 0.6920, -0.3160, -2.1152])
Tensor [0, 0, 0] after RoPE: tensor([ 0.4945, -1.3431, -0.2345, -0.4233, 1.3203, 0.0548, -0.3281, -2.1174])
Grouped Query Attention (GQA)#
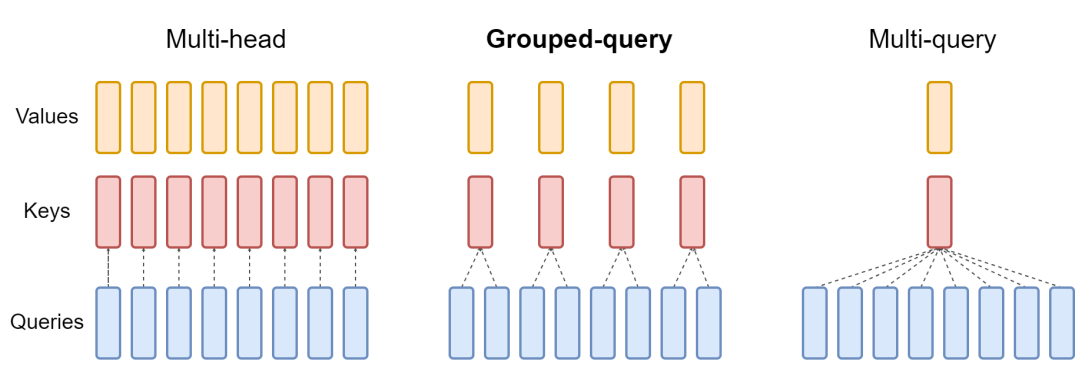
Grouped query attention (GQA) is more compute- and parameter-efficient alternative to the original multi-head attention (MHA) mechanism. Unlike MHA, where each head also has its own set of keys and values, to reduce memory usage, GQA groups multiple heads to share the same key and value projections. So, the core idea behind GQA is to reduce the number of key and value heads by sharing them across multiple query heads which (1) lowers the model’s parameter count and (2) reduces the memory bandwidth usage for key and value tensors during inference since fewer keys and values need to be stored and retrieved from the KV cache.
Even with less parameters, the paper shows that GQA performs comparably to standard MHA
![]()
Lets break it down for Qwen3 0.6B#
num_layers = 28 (transformer blocks)
d_in / emb_dim = 1024
num_heads = 16
head_dim 1024 / 16 = 64
ffn_hidden_dim = 3072 (not a GQA concern, but is part of each block)
In normal MHA:
We would have 16 Q heads, 16 K heads, 16 V heads (all separate).
In GQA, lets assume a KV group of 8 (similar to the fig above):
We will have 16 Q heads,
so every 2 Q heads share the same K/V.
num_heads = 16
num_kv_groups = 8
head_dim = None
d_in = 1024
assert num_heads % num_kv_groups == 0, "num_heads must be divisible by num_kv_groups"
group_size = num_heads // num_kv_groups
if head_dim is None:
assert d_in % num_heads == 0, "d_in must be divisible by num_heads when head_dim is None"
head_dim = d_in // num_heads
d_out = num_heads * head_dim #should be same as d_in
print("Q Heads:", num_heads)
print("KV Heads (num of KV groups):", num_kv_groups)
print("how many Q heads share one KV head?:", group_size)
print("Dim per head:", head_dim)
print("Input Dim:", d_in)
print("Output Dim:", d_out)
Q Heads: 16
KV Heads (num of KV groups): 8
how many Q heads share one KV head?: 2
Dim per head: 64
Input Dim: 1024
Output Dim: 1024
G (=num_kv_groups) |
group_size = H/G |
K/V projection dim (G*Dh) |
K/V cache vs MHA |
|---|---|---|---|
16 |
1 |
16*64 = 1024 |
same as MHA |
8 |
2 |
8*64 = 512 |
2× smaller |
4 |
4 |
4*64 = 256 |
4× smaller |
2 |
8 |
2*64 = 128 |
8× smaller |
1 |
16 |
1*64 = 64 |
16× smaller (MQA) |
Q/K/V projection. See how the K/V is 2x smaller with the group size of 2
W_query = nn.Linear(d_in, d_out, bias=False)
W_key = nn.Linear(d_in, num_kv_groups * head_dim, bias=False)
W_value = nn.Linear(d_in, num_kv_groups * head_dim, bias=False)
print("W_query shape:", W_query.weight.shape)
print("W_key shape:", W_key.weight.shape)
print("W_value shape:", W_value.weight.shape)
W_query shape: torch.Size([1024, 1024])
W_key shape: torch.Size([512, 1024])
W_value shape: torch.Size([512, 1024])
output projection maps back to input dim
out_proj = nn.Linear(d_out, d_in, bias=False)
print("out_proj shape:", out_proj.weight.shape)
out_proj shape: torch.Size([1024, 1024])
RMSNorm on Q and K i.e. before doing dot-product attention, normalize each head vector (length 64) for Q and K.
q_norm = RMSNorm(head_dim, eps=1e-6)
k_norm = RMSNorm(head_dim, eps=1e-6)
Lastly the Forward Pass
For each token, compute Q with 16 heads and K/V with 8 heads (Projection)
q = self.W_query(x)
k = self.W_key(x)
v = self.W_value(x)
Split the flat projection vectors into multi heads, reorder so “heads” comes before token (which makes the attention math easy)
q shape: (BATCH, NUM_TOKENS, NUM_HEADS * HEAD_DIM) = (BATCH, NUM_TOKENS, 16*64)
k shape: (BATCH, NUM_TOKENS, KV_HEADs * HEAD_DIM) = (BATCH, NUM_TOKENS, 8*64)
v shape: (BATCH, NUM_TOKENS, KV_HEADs * HEAD_DIM) = (BATCH, NUM_TOKENS, 8*64)
q = q.view(BATCH, NUM_TOKENS, self.num_heads, self.head_dim).transpose(1, 2)
k_new = k.view(BATCH, NUM_TOKENS, self.num_kv_groups, self.head_dim).transpose(1, 2)
v_new = v.view(BATCH, NUM_TOKENS, self.num_kv_groups, self.head_dim).transpose(1, 2)
Apply per-head RMSNorm on Q and K
q = self.q_norm(q)
k_new = self.k_norm(k_new)
RoPE on Q and K (position encoding)
q = apply_rope_adjacent(q, cos, sin, offset=start_pos)
k_new = apply_rope_adjacent(k_new, cos, sin, offset=start_pos)
Cache KV
Scaled dot-product attention scores
attn_scores = q @ k.transpose(2, 3)
attn_scores = attn_scores.masked_fill(mask, float("-inf"))
attn_weights = torch.softmax(attn_scores / sqrt(Dh), dim=-1)
Weighted sum of values, merge heads back + output projection
ctx = attn_weights @ v
ctx = ctx.transpose(1, 2).contiguous().view(B, T, self.d_out)
out = self.out_proj(ctx)
============== Qwen3's GQA Implementation ==============
import torch
import torch.nn as nn
class GroupedQueryAttention(nn.Module):
"""
GQA: H query heads, but only G key/value heads (KV shared across groups).
"""
def __init__(self, d_in, num_heads, num_kv_groups, head_dim=None,
qk_norm=False, dtype=None):
super().__init__()
assert num_heads % num_kv_groups == 0, "num_heads must be divisible by num_kv_groups"
self.num_heads = num_heads
self.num_kv_groups = num_kv_groups
self.group_size = num_heads // num_kv_groups # how many Q heads share one KV head
if head_dim is None:
assert d_in % num_heads == 0, "d_in must be divisible by num_heads when head_dim is None"
head_dim = d_in // num_heads
self.head_dim = head_dim
self.d_out = num_heads * head_dim
# Q has H heads, so project to H*Dh
self.W_query = nn.Linear(d_in, self.d_out, bias=False, dtype=dtype)
# K/V have only G heads, so project to G*Dh (smaller than Q)
self.W_key = nn.Linear(d_in, num_kv_groups * head_dim, bias=False, dtype=dtype)
self.W_value = nn.Linear(d_in, num_kv_groups * head_dim, bias=False, dtype=dtype)
# Merge heads back to model dim
self.out_proj = nn.Linear(self.d_out, d_in, bias=False, dtype=dtype)
# Optional per-head RMSNorm on Q and K (stability trick)
if qk_norm:
self.q_norm = RMSNorm(head_dim, eps=1e-6)
self.k_norm = RMSNorm(head_dim, eps=1e-6)
else:
self.q_norm = None
self.k_norm = None
def forward(self, x, mask, cos, sin, start_pos=0, cache=None):
BATCH, NUM_TOKENS, _ = x.shape
# 1) Projections
q = self.W_query(x)
k = self.W_key(x)
v = self.W_value(x)
# 2) Split into heads
q = q.view(BATCH, NUM_TOKENS, self.num_heads, self.head_dim).transpose(1, 2)
k_new = k.view(BATCH, NUM_TOKENS, self.num_kv_groups, self.head_dim).transpose(1, 2)
v_new = v.view(BATCH, NUM_TOKENS, self.num_kv_groups, self.head_dim).transpose(1, 2)
# 3) Optional Q/K norm (per head)
if self.q_norm is not None:
q = self.q_norm(q)
if self.k_norm is not None:
k_new = self.k_norm(k_new)
# 4) RoPE on Q and K (use offset for decoding)
q = apply_rope(q, cos, sin, offset=start_pos)
k_new = apply_rope(k_new, cos, sin, offset=start_pos)
# 5) KV cache: append along sequence dimension (dim=2)
if cache is not None:
prev_k, prev_v = cache
k = torch.cat([prev_k, k_new], dim=2)
v = torch.cat([prev_v, v_new], dim=2)
else:
k, v = k_new, v_new
next_cache = (k, v)
# 6) Expand KV heads G -> H (KV shared across group_size query heads)
k = k.repeat_interleave(self.group_size, dim=1)
v = v.repeat_interleave(self.group_size, dim=1)
# 7) Scaled dot-product attention
attn_scores = q @ k.transpose(2, 3)
attn_scores = attn_scores.masked_fill(mask, float("-inf"))# mask=True blocks
attn_weights = torch.softmax(attn_scores / (self.head_dim ** 0.5), dim=-1)
# 8) Weighted sum of values
ctx = attn_weights @ v
# 9) Merge heads and project out
ctx = ctx.transpose(1, 2).contiguous().view(BATCH, NUM_TOKENS, self.d_out)
out = self.out_proj(ctx)
return out, next_cache
Transformer Block#
It basically combines GQA and Feed forward together with normalization and repeat it X times e.g. for 0.6B version it would repeat 28 times.
class TransformerBlock(nn.Module):
def __init__(self, cfg):
super().__init__()
self.att = GroupedQueryAttention(
d_in=cfg["emb_dim"],
num_heads=cfg["n_heads"],
head_dim=cfg["head_dim"],
num_kv_groups=cfg["n_kv_groups"],
qk_norm=cfg["qk_norm"],
dtype=cfg["dtype"]
)
self.ff = FeedForward(cfg)
self.norm1 = RMSNorm(cfg["emb_dim"], eps=1e-6)
self.norm2 = RMSNorm(cfg["emb_dim"], eps=1e-6)
def forward(self, x, mask, cos, sin, start_pos=0, cache=None):
shortcut = x
x = self.norm1(x)
x, next_cache = self.att(
x, mask, cos, sin, start_pos=start_pos,cache=cache
) # (batch_size, num_tokens, emb_size)
x = x + shortcut
shortcut = x
x = self.norm2(x)
x = self.ff(x)
x = x + shortcut
return x, next_cache
Qwen3Model Class#
class Qwen3Model(nn.Module):
def __init__(self, cfg):
super().__init__()
# Main model parameters
self.tok_emb = nn.Embedding(cfg["vocab_size"], cfg["emb_dim"],
dtype=cfg["dtype"])
self.trf_blocks = nn.ModuleList(
[TransformerBlock(cfg) for _ in range(cfg["n_layers"])]
)
self.final_norm = RMSNorm(cfg["emb_dim"])
self.out_head = nn.Linear(
cfg["emb_dim"], cfg["vocab_size"],
bias=False, dtype=cfg["dtype"]
)
# Reusable utilities
if cfg["head_dim"] is None:
head_dim = cfg["emb_dim"] // cfg["n_heads"]
else:
head_dim = cfg["head_dim"]
cos, sin, _ = compute_rope_params(
head_dim=head_dim,
theta_base=cfg["rope_base"],
context_length=cfg["context_length"]
)
self.register_buffer("cos", cos, persistent=False)
self.register_buffer("sin", sin, persistent=False)
self.cfg = cfg
self.current_pos = 0 # Track current position in KV cache
def forward(self, in_idx, cache=None):
# Forward pass
tok_embeds = self.tok_emb(in_idx)
x = tok_embeds
num_tokens = x.shape[1]
if cache is not None:
pos_start = self.current_pos
pos_end = pos_start + num_tokens
self.current_pos = pos_end
mask = torch.triu(
torch.ones(
pos_end, pos_end, device=x.device, dtype=torch.bool
),
diagonal=1
)[pos_start:pos_end, :pos_end]
else:
pos_start = 0 # Not strictly necessary but helps torch.compile
mask = torch.triu(
torch.ones(num_tokens, num_tokens, device=x.device,
dtype=torch.bool),
diagonal=1
)
# Prefill (no cache): mask starts as (num_tokens, num_tokens)
# Cached decoding: mask starts as (num_tokens, prev_k_number_tokens + num_tokens)
#
# We add two leading dimensions so the mask becomes
# (1, 1, num_tokens, num_tokens) during prefill and
# (1, 1, num_tokens, total_key_tokens) during cached decoding.
# These extra dimensions let PyTorch broadcast the same mask
# across all batches and attention heads when applying it to
# attn_scores of shape (batch, num_heads, num_tokens, total_key_tokens).
mask = mask[None, None, :, :]
for i, block in enumerate(self.trf_blocks):
blk_cache = cache.get(i) if cache else None
x, new_blk_cache = block(x, mask, self.cos, self.sin,
start_pos=pos_start,
cache=blk_cache)
if cache is not None:
cache.update(i, new_blk_cache)
x = self.final_norm(x)
logits = self.out_head(x.to(self.cfg["dtype"]))
return logits
def reset_kv_cache(self):
self.current_pos = 0
CHOOSE_MODEL = "0.6B"
if CHOOSE_MODEL == "0.6B":
QWEN3_CONFIG = {
"vocab_size": 151_936, # Vocabulary size
"context_length": 40_960, # Context length that was used to train the model
"emb_dim": 1024, # Embedding dimension
"n_heads": 16, # Number of attention heads
"n_layers": 28, # Number of layers
"hidden_dim": 3072, # Size of the intermediate dimension in FeedForward
"head_dim": 128, # Size of the heads in GQA
"qk_norm": True, # Whether to normalize queries and keys in GQA
"n_kv_groups": 8, # Key-Value groups for grouped-query attention
"rope_base": 1_000_000.0, # The base in RoPE's "theta"
"dtype": torch.bfloat16, # Lower-precision dtype to reduce memory usage
}
else:
raise ValueError(f"{CHOOSE_MODEL} is not supported.")
model = Qwen3Model(QWEN3_CONFIG)
Qwen3-0.6B pretrained weights from HF#
I downloaded the safetensors for Qwen3-0.6B. Its basically a state_dict saved to disck showing tensor names (weights) that we would load
from safetensors.torch import safe_open
with safe_open("model/model.safetensors", framework="pt", device="cpu") as f:
for k in list(f.keys())[:50]:
print(k, f.get_tensor(k).shape)
lm_head.weight torch.Size([151936, 1024])
model.embed_tokens.weight torch.Size([151936, 1024])
model.layers.0.input_layernorm.weight torch.Size([1024])
model.layers.0.mlp.down_proj.weight torch.Size([1024, 3072])
model.layers.0.mlp.gate_proj.weight torch.Size([3072, 1024])
model.layers.0.mlp.up_proj.weight torch.Size([3072, 1024])
model.layers.0.post_attention_layernorm.weight torch.Size([1024])
model.layers.0.self_attn.k_norm.weight torch.Size([128])
model.layers.0.self_attn.k_proj.weight torch.Size([1024, 1024])
model.layers.0.self_attn.o_proj.weight torch.Size([1024, 2048])
model.layers.0.self_attn.q_norm.weight torch.Size([128])
model.layers.0.self_attn.q_proj.weight torch.Size([2048, 1024])
model.layers.0.self_attn.v_proj.weight torch.Size([1024, 1024])
model.layers.1.input_layernorm.weight torch.Size([1024])
model.layers.1.mlp.down_proj.weight torch.Size([1024, 3072])
model.layers.1.mlp.gate_proj.weight torch.Size([3072, 1024])
model.layers.1.mlp.up_proj.weight torch.Size([3072, 1024])
model.layers.1.post_attention_layernorm.weight torch.Size([1024])
model.layers.1.self_attn.k_norm.weight torch.Size([128])
model.layers.1.self_attn.k_proj.weight torch.Size([1024, 1024])
model.layers.1.self_attn.o_proj.weight torch.Size([1024, 2048])
model.layers.1.self_attn.q_norm.weight torch.Size([128])
model.layers.1.self_attn.q_proj.weight torch.Size([2048, 1024])
model.layers.1.self_attn.v_proj.weight torch.Size([1024, 1024])
model.layers.10.input_layernorm.weight torch.Size([1024])
model.layers.10.mlp.down_proj.weight torch.Size([1024, 3072])
model.layers.10.mlp.gate_proj.weight torch.Size([3072, 1024])
model.layers.10.mlp.up_proj.weight torch.Size([3072, 1024])
model.layers.10.post_attention_layernorm.weight torch.Size([1024])
model.layers.10.self_attn.k_norm.weight torch.Size([128])
model.layers.10.self_attn.k_proj.weight torch.Size([1024, 1024])
model.layers.10.self_attn.o_proj.weight torch.Size([1024, 2048])
model.layers.10.self_attn.q_norm.weight torch.Size([128])
model.layers.10.self_attn.q_proj.weight torch.Size([2048, 1024])
model.layers.10.self_attn.v_proj.weight torch.Size([1024, 1024])
model.layers.11.input_layernorm.weight torch.Size([1024])
model.layers.11.mlp.down_proj.weight torch.Size([1024, 3072])
model.layers.11.mlp.gate_proj.weight torch.Size([3072, 1024])
model.layers.11.mlp.up_proj.weight torch.Size([3072, 1024])
model.layers.11.post_attention_layernorm.weight torch.Size([1024])
model.layers.11.self_attn.k_norm.weight torch.Size([128])
model.layers.11.self_attn.k_proj.weight torch.Size([1024, 1024])
model.layers.11.self_attn.o_proj.weight torch.Size([1024, 2048])
model.layers.11.self_attn.q_norm.weight torch.Size([128])
model.layers.11.self_attn.q_proj.weight torch.Size([2048, 1024])
model.layers.11.self_attn.v_proj.weight torch.Size([1024, 1024])
model.layers.12.input_layernorm.weight torch.Size([1024])
model.layers.12.mlp.down_proj.weight torch.Size([1024, 3072])
model.layers.12.mlp.gate_proj.weight torch.Size([3072, 1024])
model.layers.12.mlp.up_proj.weight torch.Size([3072, 1024])
Function to load the weights into Qwen3Model model object#
def load_weights_into_qwen(model, param_config, params):
def assign(left, right, tensor_name="unknown"):
if left.shape != right.shape:
raise ValueError(
f"Shape mismatch in tensor "
f"'{tensor_name}'. Left: {left.shape}, "
f"Right: {right.shape}"
)
return torch.nn.Parameter(
right.clone().detach()
if isinstance(right, torch.Tensor)
else torch.tensor(right)
)
model.tok_emb.weight = assign(
model.tok_emb.weight,
params["model.embed_tokens.weight"],
"model.embed_tokens.weight"
)
for l in range(param_config["n_layers"]):
block = model.trf_blocks[l]
att = block.att
# Q, K, V projections (weights)
att.W_query.weight = assign(
att.W_query.weight,
params[f"model.layers.{l}.self_attn.q_proj.weight"],
f"model.layers.{l}.self_attn.q_proj.weight"
)
att.W_key.weight = assign(
att.W_key.weight,
params[f"model.layers.{l}.self_attn.k_proj.weight"],
f"model.layers.{l}.self_attn.k_proj.weight"
)
att.W_value.weight = assign(
att.W_value.weight,
params[f"model.layers.{l}.self_attn.v_proj.weight"],
f"model.layers.{l}.self_attn.v_proj.weight"
)
# Output projection
att.out_proj.weight = assign(
att.out_proj.weight,
params[f"model.layers.{l}.self_attn.o_proj.weight"],
f"model.layers.{l}.self_attn.o_proj.weight"
)
# QK norms
if hasattr(att, "q_norm") and att.q_norm is not None:
att.q_norm.scale = assign(
att.q_norm.scale,
params[f"model.layers.{l}.self_attn.q_norm.weight"],
f"model.layers.{l}.self_attn.q_norm.weight"
)
if hasattr(att, "k_norm") and att.k_norm is not None:
att.k_norm.scale = assign(
att.k_norm.scale,
params[f"model.layers.{l}.self_attn.k_norm.weight"],
f"model.layers.{l}.self_attn.k_norm.weight"
)
# Attention layernorm
block.norm1.scale = assign(
block.norm1.scale,
params[f"model.layers.{l}.input_layernorm.weight"],
f"model.layers.{l}.input_layernorm.weight"
)
# Feedforward weights
block.ff.fc1.weight = assign(
block.ff.fc1.weight,
params[f"model.layers.{l}.mlp.gate_proj.weight"],
f"model.layers.{l}.mlp.gate_proj.weight"
)
block.ff.fc2.weight = assign(
block.ff.fc2.weight,
params[f"model.layers.{l}.mlp.up_proj.weight"],
f"model.layers.{l}.mlp.up_proj.weight"
)
block.ff.fc3.weight = assign(
block.ff.fc3.weight,
params[f"model.layers.{l}.mlp.down_proj.weight"],
f"model.layers.{l}.mlp.down_proj.weight"
)
block.norm2.scale = assign(
block.norm2.scale,
params[f"model.layers.{l}.post_attention_layernorm.weight"],
f"model.layers.{l}.post_attention_layernorm.weight"
)
# Final normalization and output head
model.final_norm.scale = assign(
model.final_norm.scale,
params["model.norm.weight"],
"model.norm.weight"
)
if "lm_head.weight" in params:
model.out_head.weight = assign(
model.out_head.weight,
params["lm_head.weight"],
"lm_head.weight"
)
else:
# Model uses weight tying
print("Model uses weight tying.")
model.out_head.weight = assign(
model.out_head.weight,
params["model.embed_tokens.weight"],
"model.embed_tokens.weight"
)
Download model weights from huggingface and load#
import json
import os
from pathlib import Path
from safetensors.torch import load_file
from huggingface_hub import hf_hub_download, snapshot_download
# USE_REASONING_MODEL = True
# if USE_REASONING_MODEL:
# repo_id = f"Qwen/Qwen3-{CHOOSE_MODEL}"
# else:
# repo_id = f"Qwen/Qwen3-{CHOOSE_MODEL}-Base"
# local_dir = Path(repo_id).parts[-1]
# weights_file = hf_hub_download(
# repo_id=repo_id,
# filename="model.safetensors",
# local_dir=local_dir,
# )
# weights_dict = load_file(weights_file)
# Since I dowanloaded the model from https://huggingface.co/Qwen/Qwen3-0.6B/tree/main
QWEN3_0_6B_MODEL = Path("model/model.safetensors")
weights_dict = load_file(str(QWEN3_0_6B_MODEL))
load_weights_into_qwen(model, QWEN3_CONFIG, weights_dict)
del weights_dict # Delete to save memory
setting up target device#
def get_device():
if torch.cuda.is_available():
device = torch.device("cuda")
print("Using NVIDIA CUDA GPU")
elif torch.backends.mps.is_available():
device = torch.device("mps")
print("Using Apple Silicon GPU (MPS)")
elif torch.xpu.is_available():
device = torch.device("xpu")
print("Intel GPU")
else:
device = torch.device("cpu")
print("Using CPU")
return device
device = get_device()
model.to(device)
Using Apple Silicon GPU (MPS)
Qwen3Model(
(tok_emb): Embedding(151936, 1024)
(trf_blocks): ModuleList(
(0-27): 28 x TransformerBlock(
(att): GroupedQueryAttention(
(W_query): Linear(in_features=1024, out_features=2048, bias=False)
(W_key): Linear(in_features=1024, out_features=1024, bias=False)
(W_value): Linear(in_features=1024, out_features=1024, bias=False)
(out_proj): Linear(in_features=2048, out_features=1024, bias=False)
(q_norm): RMSNorm()
(k_norm): RMSNorm()
)
(ff): FeedForward(
(fc1): Linear(in_features=1024, out_features=3072, bias=False)
(fc2): Linear(in_features=1024, out_features=3072, bias=False)
(fc3): Linear(in_features=3072, out_features=1024, bias=False)
)
(norm1): RMSNorm()
(norm2): RMSNorm()
)
)
(final_norm): RMSNorm()
(out_head): Linear(in_features=1024, out_features=151936, bias=False)
)
Load Tokenizer#
I downloaded the tokenizer_config and tokenizer.json and pointed the AutoTokenizer to the folder
from transformers import AutoTokenizer
# hf_hub_download(
# repo_id=repo_id,
# filename="tokenizer.json",
# local_dir=local_dir,
# )
tokenizer = AutoTokenizer.from_pretrained("model", use_fast=True)
prompt = "Should I love math to learn AI?"
messages = [{"role": "user", "content": prompt}]
chat_prompt = tokenizer.apply_chat_template(
messages,
tokenize=False,
add_generation_prompt=True,
)
print(repr(chat_prompt))
'<|im_start|>user\nShould I love math to learn AI?<|im_end|>\n<|im_start|>assistant\n'
Inference#
The KV-cache-related heavy-lifting is mostly done in the Qwen3Model and GroupedQueryAttention code. The object of KVCache would be passed to the Model to persist the cache per transformer layer i.e. it basically acts as an external storage for past attention state…
class KVCache:
def __init__(self, n_layers):
self.cache = [None] * n_layers
def get(self, layer_idx):
return self.cache[layer_idx]
def update(self, layer_idx, value):
self.cache[layer_idx] = value
def get_all(self):
return self.cache
def reset(self):
for i in range(len(self.cache)):
self.cache[i] = None
Note: this is a poor and hyper-simplified version of what a inference serving engine like vLLM would do i.e. do prefill once on the prompt (build KV for input), decode token by token (only compute kv for new token), rely on KV cache to avoid recompute… This code does not have the glorified way of pagedAttention, batching, scheduler, proper memory management, kernel fusion, OH yeah - the tensor parallel support blah blah blah… you get the point that I am not qualified yet to write all of that - and wasnt in the scope for this notebook…
def generate_text_basic_stream(
model, token_ids, max_new_tokens,
eos_token_id=None, context_size=None
):
model.eval()
with torch.no_grad(): #to make inference faster/cheaper??
cache = KVCache(n_layers=model.cfg["n_layers"])
model.reset_kv_cache()
# Prime the cache with the initial context
logits = model(token_ids, cache=cache)
for _ in range(max_new_tokens):
next_token = torch.argmax(
logits[:, -1], dim=-1, keepdim=True
)
if (eos_token_id is not None and
torch.all(next_token == eos_token_id)):
break
yield next_token
token_ids = torch.cat(
[token_ids, next_token], dim=1
)
# Feed only the new token to the model;
# cache handles history
logits = model(next_token, cache=cache)
input_token_ids = tokenizer.encode(chat_prompt)
input_token_ids_tensor = torch.tensor(
input_token_ids, device=device
).unsqueeze(0)
print("=== Prompt ===")
print(tokenizer.decode(input_token_ids))
print("=== Model Response ===")
for token in generate_text_basic_stream(
model=model,
token_ids=input_token_ids_tensor,
max_new_tokens=500,
eos_token_id=tokenizer.eos_token_id
):
token_id = token.squeeze(0).tolist()
print(
tokenizer.decode(token_id),
end="",
flush=True
)
=== Prompt ===
<|im_start|>user
Should I love math to learn AI?<|im_end|>
<|im_start|>assistant
=== Model Response ===
<think>
Okay, the user is asking if they should love math to learn AI. Let me break this down. First, I need to consider the relationship between math and AI. AI is a field that heavily relies on mathematical concepts, right? So math is a fundamental part of AI development.
But the user might be thinking about why they should love math. Maybe they're concerned that math could be too abstract or not relevant to AI. I should address that. It's important to explain that math is essential for understanding AI, but it's not the only path. They can still pursue AI with a different approach.
I should also mention that math isn't just about the subject itself but how it's applied. For example, linear algebra is crucial for machine learning models. So math is a tool, not a hobby. It's about understanding the underlying principles.
Additionally, the user might be looking for motivation. If they love math, they might find AI more interesting. But it's also important to highlight that AI is a complex field, and math is part of it. Maybe suggest that they can combine their interest in math with AI to make it more engaging.
I need to make sure the answer is clear and addresses both the necessity of math in AI and the possibility of finding it enjoyable. Avoid any negative assumptions and instead present a balanced view. Also, check for any possible misunderstandings and clarify that math is a tool, not a hobby.
</think>
Loving math is not a requirement to learn AI, but it can be a valuable foundation. Here's why:
1. **Math is the backbone of AI**: AI relies on mathematical principles like linear algebra, probability, calculus, and statistics. These concepts are essential for building algorithms, data analysis, and machine learning models.
2. **Math is not a hobby**: While math can be enjoyable, it's a tool that helps you understand and solve complex problems in AI. It's not about the subject itself but how it's applied.
3. **Combining interests**: If you love math, you might find AI more engaging. However, AI is a complex field, and math is part of it. You can pursue it with a different approach.
Ultimately, AI is a fascinating intersection of math and technology, and combining both can lead to a rewarding journey. Let me know if you'd like help exploring this further!
Mixture-of-Experts (MoE)#
The core idea in MoE is to replace each FeedForward module in a transformer block with multiple expert layers, where each of these expert layers is also a FeedForward module. This means that we swap a single FeedForward block for multiple FeedForward blocks
So, replacing a single FeedForward block with multiple FeedForward blocks (as done in a MoE setup) substantially increases the model’s total parameter count. However, the key trick is that we don’t use (“activate”) all experts for every token. Instead, a router selects only a small subset of experts per token.
TODO 🚧: try building the router for science in a separate notebook…